폴란드 출신의 천문학자 니콜라우스 코페르니쿠스(Nicolaus Copernicus)는 1543년에 "천체의 회전에 대하여"(De Revolutionibus Orbium Coelestium)라는 책을 출간하였습니다. 그는 이 책에서 지구가 태양 주위를 공전한다는 태양 중심의 천문 모델인 지동설을 제안하였습니다.
기계 세상에서도 지구처럼 공전하는 톱니바퀴가 존재합니다. 이번 글은 태양과 지구의 운동을 닮은 톱니바퀴, 즉 태양기어(Sun Gear)와 유성기어(Planetary Gear)에 대해 이야기입니다.
스퍼기어 메커니즘
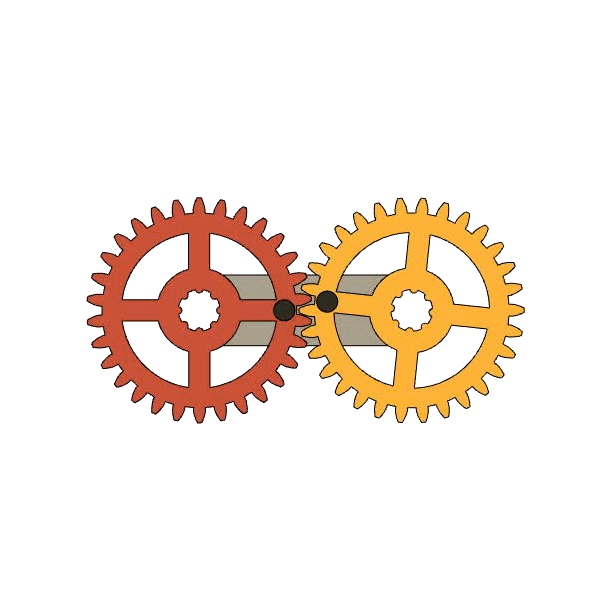
우리 주변에서 흔히 볼 수 있는 스퍼기어(Spur Gear) 메커니즘은 두 개의 기어가 맞물려 회전을 합니다. 구조를 살펴보면, 고정된 회색 프레임에 연결된 빨간색 스퍼기어와 노란색 스퍼기어가 서로 맞물려 있으며, 각각 제자리에서 회전하면서 동력을 전달하고 있습니다.
태양기어와 유성기어
스퍼기어 메커니즘에서 고정부를 기존의 회색 프레임에서 빨간색 기어로 변경하면, 두 기어의 움직임이 어떻게 달라질까요?
고정부를 회색 프레임에서 빨간색 기어로 변경할 경우, 자전만 하던 두 스퍼기어는 새로운 역할을 가지게 됩니다. 노란색 기어는 제자리에서 회전(자전)하는 것이 아니라 빨간색 기어의 둘레를 따라 공전하는 운동을 하게 됩니다.
이때, 고정된 빨간색 기어를 태양기어(Sun Gear)라고 하고, 태양기어 둘레를 따라 움직이는 노란색 기어를 유성기어(Planetary Gear)라고 합니다. 즉, 태양기어는 태양, 유성기어는 지구에 비유할 수 있습니다.
특히, 유성기어(노란색 기어)는 고정된 태양기어(빨간색 기어, 0회전) 둘레를 1 바퀴 공전하는 동안 스스로 2 바퀴 회전하게 됩니다. 기어에 표시된 검은색 점이 몇 회전하는지 주의 깊게 관찰하면 쉽게 이해할 수 있습니다.
유성기어 메커니즘
이처럼 스퍼기어 메커니즘에서 고정부를 변경하여 태양기어(Sun Gear)와 유성기어(Planetary Gear)로 구성한 기계 구조를 유성기어 메커니즘(Planetary Gear Mechanism)이라고 합니다.
이 메커니즘은 다음과 같은 세 가지 주요 요소로 구성됩니다.
1. 태양기어(Sun Gear) – 중심에 위치하며 회전의 중심 역할을 합니다.
2. 유성기어(Planetary Gear) – 태양기어 주위를 공전하며 동력을 전달합니다.
3. 캐리어(Carrier) – 유성기어를 지지하고 회전하는 경로를 결정하는 프레임 역할을 합니다.
예를 들어, 다음과 같이 빨간색 태양기어와 노란색 유성기어가 맞물려 있는 경우를 살펴보겠습니다. 두 기어의 톱니 수는 각각 30개이며, 각 기어의 축은 회색 프레임(캐리어)을 통해 연결되어 있습니다.
유성기어 메커니즘의 구속 조건 변경
이번에는 유성기어 메커니즘의 구속 조건을 변경하여 새로운 기어 운동을 분석해 보겠습니다.
1) 구속 조건 변경
1. 빨간색 태양기어(기존에 고정되었던 기어)
→ 다시 회전할 수 있도록 설정
2. 노란색 유성기어(기존에 공전하면서 2회전했던 기어)
→ 공전은 하지만 자체 회전(자전)은 하지 못하도록 고정(0회전)
2) 새로운 조건에서 기어의 운동
이제 노란색 유성기어가 회전하지 못하게 고정된 상태에서,
노란색 유성기어가 빨간색 태양기어의 둘레를 따라 반시계 방향으로 한 바퀴 공전한다고 가정하겠습니다.
이 경우 빨간색 태양기어는 어느 방향으로 몇 회전할까요?
유성기어 메커니즘의 회전수 계산 방법
유성기어 메커니즘에서 회전 방향의 부호를 다음과 같이 정의합니다.
반시계 방향 회전 → "+" (양의 값)
시계 방향 회전 → "-" (음의 값)
기어의 회전수를 계산할 때는 각 기어에 표시된 검은색 점이 움직이는 궤적을 주의 깊게 관찰하는 것이 중요합니다.
1) 두 기어를 프레임에 고정한 상태에서의 회전수
먼저, 빨간색 태양기어와 노란색 유성기어를 회색 프레임(캐리어)에 모두 고정한 상태에서,
회색 프레임을 빨간색 기어의 회전축을 중심으로 반시계 방향으로 1회전 시켜 보겠습니다.
이때,
빨간색 태양기어,
노란색 유성기어,
회색 프레임(캐리어)
모두 반시계 방향으로 1회전하게 됩니다.
따라서, 각 기계요소의 회전수는 다음과 같습니다.
빨간색 태양기어: +1
노란색 유성기어: +1
회색 프레임(캐리어): +1
즉, 회색 프레임과 함께 회전하는 모든 요소는 같은 방향으로 동일한 회전수를 갖게 됩니다.
2) 회색 프레임만 고정한 상태에서의 회전수
이번에는 회색 프레임(캐리어)만 고정한 상태에서, 노란색 유성기어를 시계 방향으로 1회전 시켜 보겠습니다.
이때 회전수는 다음과 같이 계산됩니다.
회색 프레임(캐리어)의 회전수 = 0 (고정됨)
노란색 유성기어의 회전수 = -1 (시계 방향 회전이므로 음수)
빨간색 태양기어의 회전수 = +1(노란색 기어와 맞물려 있으며, 톱니 수가 동일하고 반대 방향으로 회전하므로)
즉, 빨간색 태양기어의 회전수는 다음과 같이 계산됩니다.
빨간색 기어의 회전수 = 노란색 기어의 톱니 수 / 빨간색 기어의 톱니 수 = 30 / 30 = +1
따라서, 최종적으로 각 기계요소의 회전수는 다음과 같습니다.
회색 프레임(캐리어): 0
노란색 유성기어: -1
빨간색 태양기어: +1
즉, 유성기어(노란색)가 시계 방향으로 회전하면,
맞물린 태양기어(빨간색)는 반시계 방향으로 동일한 회전수를 갖게 됩니다.
3) 1)과 2)의 회전수 합성
마지막으로 1) 두 기어를 프레임에 고정한 상태에서의 회전수와 2) 회색 프레임만 고정한 상태에서의 회전수를 합성합니다.
1)과 2)의 회전수를 합성한 결과는 다음과 같습니다.
회색 프레임의 경우 (+1) + 0 = +1이 되므로 반시계 방향으로 1회전합니다.
노란색 기어의 경우 (+1) + (-1) = 0이 됩니다.
즉, 1)에서 반시계 방향으로 1회전하면서 +1을 얻었지만, 2)에서 시계방향으로 1회전하며 -1을 얻었기 때문에 더하면 0이 되므로 원위치로 돌아온 셈입니다. 이렇게 합성한 결과 노란색 기어는 회전하지 못하게 고정시키는(0회전) 구속 조건이 완성됩니다.
빨간색 기어의 경우 (+1) + (+1) = +2가 되므로 반시계 방향으로 2회전합니다.
지금까지 살펴본 1), 2), 3)에서 계산한 회전수를 요약하면 다음과 같이 표로 나타낼 수 있습니다.

즉, 합성 회전 결과,
노란색 기어가 회전하지 못하게 고정된 상태(0회전)에서,
빨간색 기어의 둘레를 반시계 방향으로 한 바퀴 공전하는 동안
빨간색 기어는 반시계 방향으로 2회전하게 됩니다.
노란색 기어의 톱니 수를 Zy,
빨간색 기어의 톱니 수를 Zr이라고 하면,
일반화해서 다음과 같은 공식으로 표현할 수 있습니다.
따라서 빨간색 기어와 노란색 기어의 톱니 개수만 알면 공식에 의해 빨간색 기어의 회전수를 쉽게 계산할 수 있습니다.

유성기어 메커니즘을 응용하면
다음의 작동 영상처럼 1회 왕복 직선운동할 때마다 2회전하는 메커니즘을 만들 수 있습니다.
유성기어의 역사적 배경
1. 안티키테라 메커니즘(Antikythera Mechanism)
태양기어의 둘레를 공전하는 유성기어(Planetary Gear)의 역사는 언제부터 시작되었을까요?
현재까지 알려진 가장 초기의 유성기어 사용 사례로 추정되는 것은 *안티키테라 메커니즘(Antikythera Mechanism)"입니다.

안티키테라 메커니즘(Antikythera Mechanism)은 고대 그리스 시대에 만들어진 수동식 천문 기계로, 현존하는 가장 오래된 아날로그 계산기로 알려져 있습니다.
이 기계는 천문학과 수학의 정교한 이론에 따라 설계되었으며, 다양한 크기의 톱니바퀴와 지시자 등이 정교하게 맞물려 복잡한 구조를 이루고 있습니다. 주된 역할은 태양, 달, 그리고 행성들의 움직임을 추적하고 예측하는 것으로, 기원전 2세기(약 기원전 100~150년경)에 제작된 것으로 추정됩니다.
이 메커니즘은 1901년, 그리스 안티키테라 해안의 난파선에서 발견되었습니다. 발견 이후 많은 학자들의 관심을 받아 지속적으로 복원과 연구가 진행되었으며, 그 구조와 작동 원리에 대한 이해도 점점 높아지고 있습니다. 그러나 현대 과학으로도 완벽히 해독되지 않은 부분이 남아 있을 정도로 복잡하고 정교한 기계로 평가됩니다. 이 기계의 존재는 고대 그리스의 천문학적 지식과 기술 수준이 매우 뛰어났음을 증명하는 중요한 유물로 여겨집니다.
Alastair Godfrey(알라스터 고드프리) 박사가 직접 복원한 안티키테라 메커니즘의 내부를 살펴보면, 다양한 크기의 톱니바퀴와 지시자들이 정밀하게 조합되어 있는 구조를 확인할 수 있습니다. 이 기계는 정교한 기어 시스템을 통해 복잡한 천문학적 계산을 수행하도록 설계되었으며, 톱니바퀴 간의 정밀한 연결이 중요한 역할을 합니다.
작동 영상을 보면, 태양기어를 중심으로 공전하면서 자전하는 유성기어의 움직임뿐만 아니라, 왼쪽 부분의 지시자가 앞서거니 뒤서거니 하며 회전 속도가 변하는 모습도 볼 수 있습니다. 이는 기어 간의 상호작용을 통해 속도가 조정되는 독특한 메커니즘을 보여줍니다.

2. 제임스 와트의 증기기관
제임스 와트(James Watt)는 18세기 스코틀랜드의 기계공학자로, 증기기관의 개량과 발전에 크게 기여한 인물로 잘 알려져 있습니다.
제임스 와트는 기존 증기기관의 특허를 우회하기 위해, 피스톤의 왕복 직선운동을 회전운동으로 변환하기 위한 새로운 방식이 필요했습니다.
그는 일반적으로 사용되던 크랭크 방식 대신, 톱니바퀴 두 개를 조합한 유성기어 메커니즘을 활용하여 이 문제를 해결하였습니다.

와트가 발명한 유성기어 메커니즘은 플라이휠의 회전 속도를 증가시키고, 증기의 힘을 보다 효율적으로 활용할 수 있도록 설계되었습니다. 아래 영상에서는 노란색 유성기어가 빨간색 태양기어 주위를 공전하는 유성기어 메커니즘의 작동 원리를 보여줍니다.
회색 링크가 1회 왕복 원호운동을 하면
노란색 유성기어가 회전 없이(0회전) 한 바퀴 공전
빨간색 태양기어와 파란색 플라이휠은 각각 2회전
이 기술을 통해 증기기관의 성능이 획기적으로 향상되었으며, 효율적인 동력 전달이 가능해졌습니다.
그 결과, 와트의 증기기관은 산업 전반에 널리 활용되었고, 산업 혁명의 발전을 이끄는 핵심 기술 중 하나로 자리 잡게 되었습니다.
볼튼 & 와트 증기기관은 18세기에 제임스 와트(James Watt)와 매슈 볼턴(Matthew Boulton)이 공동 개발한 역사적인 기계로, 유성기어 메커니즘을 활용한 증기기관의 대표적인 사례입니다.
현재 이 증기기관은 호주 시드니의 파워하우스 박물관(Powerhouse Museum)에 전시되어 있으며, 증기를 이용해 에너지를 생성하고 기계적인 운동을 만들어내는 방식으로 작동합니다.
이 기계는 산업 혁명의 핵심 기술 중 하나로 평가되며, 현대 기계공학과 동력 전달 기술의 발전에 지대한 영향을 미친 중요한 유산으로 남아 있습니다.

스퍼기어의 자전 운동은 비교적 단순합니다. 그러나 공전하는 유성기어(Planetary Gear)는 회전수의 영향을 받기 때문에 그 운동이 다소 복잡하게 느껴질 수 있습니다.
이번 글을 통해 태양기어(Sun Gear), 유성기어(Planetary Gear), 그리고 유성기어 메커니즘(Planetary Gear Mechanism)을 보다 쉽게 이해할 수 있기를 바랍니다
'기계기술' 카테고리의 다른 글
| 평판캠 기구를 활용한 I 모형: 캠의 회전운동을 왕복 직선운동으로 변환하는 메커니즘 (0) | 2025.03.20 |
|---|---|
| 왕복 더블 슬라이더 크랭크 기구를 활용한 H 모형: 슬롯 링크를 사용해서 왕복 직선운동으로 변환하는 메커니즘 (0) | 2025.03.19 |
| 4절 크랭크 기구의 한 종류인 더블 크랭크 기구를 활용한 G 모형: 회전하는 두 링크를 연결해서 회전운동을 전달하는 메커니즘 (0) | 2025.03.13 |
| 마찰 전동 기구 중 평마찰차 기구를 활용한 F 모형: 두 바퀴 사이의 마찰력을 이용해서 회전운동을 전달하는 메커니즘 (0) | 2025.03.05 |
| 3d프린터로 만든 수동단속기구의 구조 및 작동원리~레고로 배우는 기계의 운동원리 152~M113 모형 (1) | 2025.03.05 |



